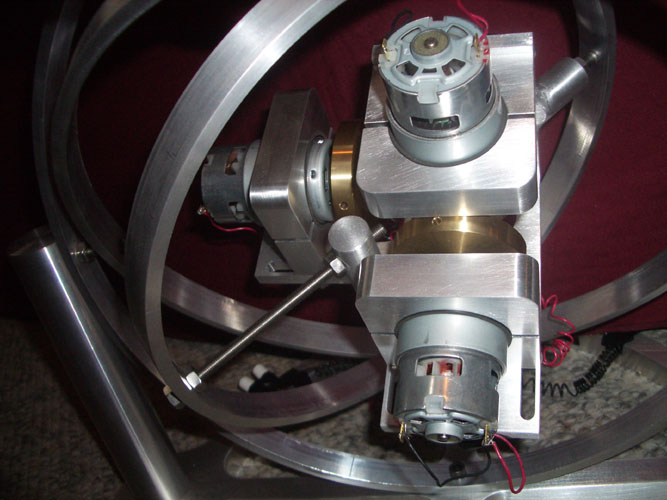
The model satellite
consists of a gimbaled system
constructed entirely from aluminum containing three concentric rings.
The
outermost ring is bolted to the frame while the middle and innermost
rings are
connected to the outermost and middle ring respectively via ball
bearings. An
aluminum platform is mounted through the innermost ring on which the
three
orthogonal gyroscopes are mounted. The gyroscopes consist of three DC
motors
with 6 cm diameter brass rings attached to them. The motors are powered
by
three power sources (available in the Outreach Lab). Loosely coiled
wires were
run from the motors to connections secured on the base of the gimbals.
From
these connections the wires could be connected to the power sources.
The acceleration of the motors causes a change in angular
momentum due to the change in angular velocity of the spinning brass
wheels.
This change induces a torque and will rotate the model satellite. With
the
gimbaled system the model is free to rotate in any direction and can do
so with
the three orthogonal motors. When the three motors are spun at high
angular
velocities, the high angular momentum will resist the tilting of the
model,
stabilizing it and allowing it to hold its orientation.
Full detailed building
plans available here.


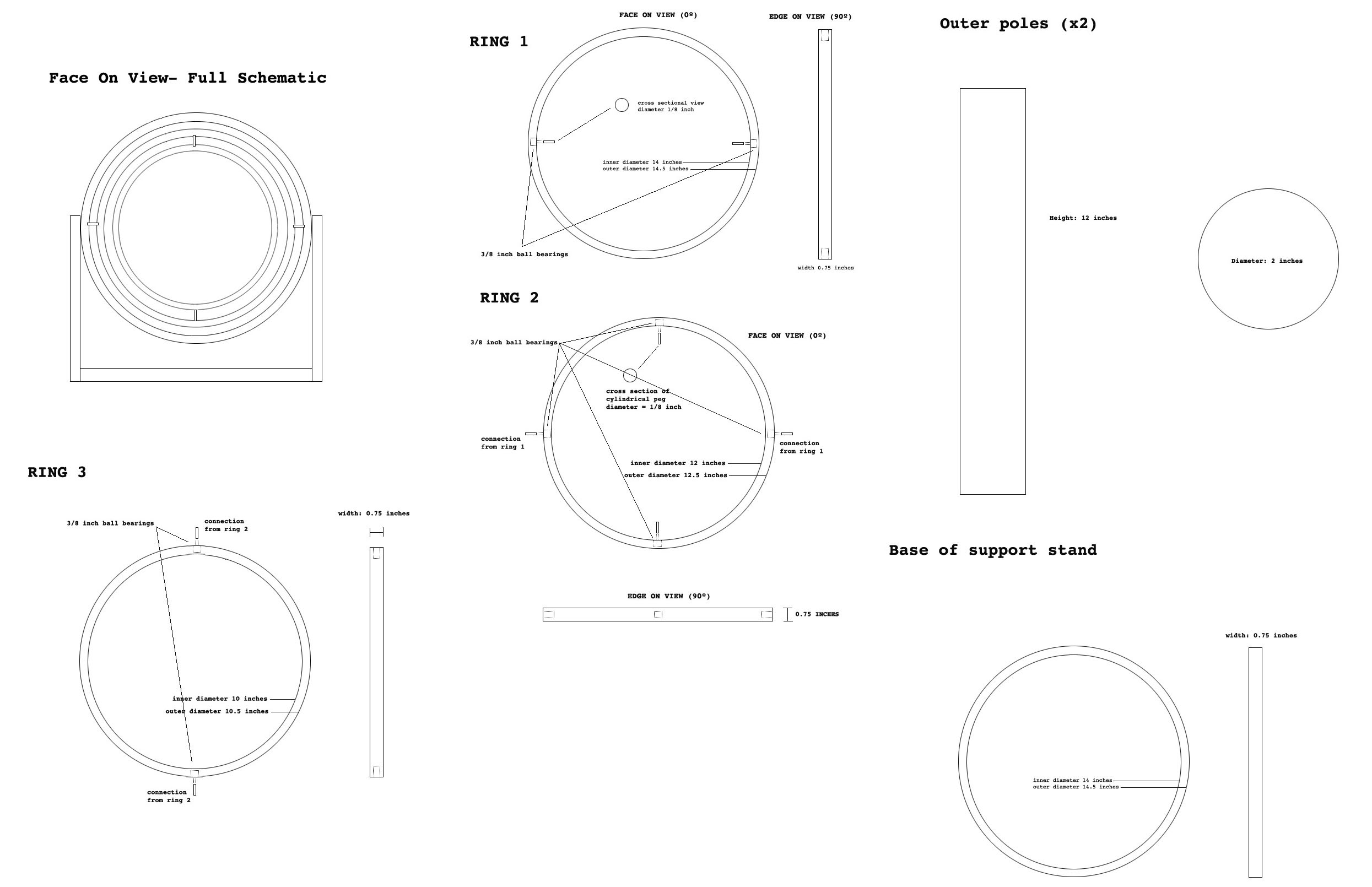{kind=link}